Il passaggio a livello è di un realismo incredibile.
Ben arrivato! Fai login o registrati per fruire di tutte le funzionalità del forum e del sito.
Se eri già registrato e non ti ricordi la password usa questo link per recuperare l'accesso.
Sito e forum dedicati al fermodellismo, il nostro hobby viene praticato in molte maniere diverse, tutte ugualmente valide: hai un plastico? oppure sei un collezionista? oppure un semplice appassionato? Non esitare a scrivere nel forum, tutti gli interventi sono benvenuti... Postate foto e video del vostro plastico e chiedete aiuto per ogni problema o curiosità inerente al nostro hobby.
MODULI "piattaforma girevole" e "ultimo casello"
Moderatore: Andrea
-
giuseppe_risso

- Socio GAS TT
- Messaggi: 7739
- Iscritto il: giovedì 27 ottobre 2011, 22:44
- Nome: Giuseppe
- Regione: Liguria
- Città: Chiavari
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
E' uno spettacolo complimenti.
Il passaggio a livello è di un realismo incredibile.
Il passaggio a livello è di un realismo incredibile.
Giuseppe Risso - FERROMODELLISTA io e i miei trenini
-
Edgardo_Rosatti

- Socio GAS TT
- Messaggi: 5237
- Iscritto il: venerdì 28 ottobre 2011, 0:59
- Nome: Edgardo
- Regione: Lombardia
- Città: Muggiò
- Età: 61
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Non vedo l'ora di vederlo dal vivo Andrea! Ottimo lavoro
Giuseppe, la fotoincisione è una cosa straordinaria, ma anche difficile da attuare.
Però ci si prova e pian piano i risultati si concretizzano.
Fa niente se ci vuole tempo, alla fine la soddifazione cancella la fatica del lavoro svolto, ed è quello che conta
Vorrei fare un pubblico annuncio per tutti i possessori di smartphone con sistema operativo Android che saranno presenti a Novegro.
Se avete uno smartphone Android scaricatevi dal market questa app:
https://play.google.com/store/apps/deta ... pp.control
E' gratuita e potrete essere voi a comandare il movimento del PL
Giuseppe, la fotoincisione è una cosa straordinaria, ma anche difficile da attuare.
Però ci si prova e pian piano i risultati si concretizzano.
Fa niente se ci vuole tempo, alla fine la soddifazione cancella la fatica del lavoro svolto, ed è quello che conta
Vorrei fare un pubblico annuncio per tutti i possessori di smartphone con sistema operativo Android che saranno presenti a Novegro.
Se avete uno smartphone Android scaricatevi dal market questa app:
https://play.google.com/store/apps/deta ... pp.control
E' gratuita e potrete essere voi a comandare il movimento del PL
ED
-
Andrea

- Socio GAS TT
- Messaggi: 23717
- Iscritto il: mercoledì 26 ottobre 2011, 19:42
- Nome: Andrea
- Regione: Lombardia
- Città: Milano
- Ruolo: Amministratore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Molto presto, sugli schermi di scalaTT.it, la fotostoria di uno dei due moduli: <font color="maroon">"Loco F.S. in manovra nell'area servizi"</font id="maroon">.
Questa la foto di apertura, è stata scattata da Claudio a Novegro.

Questa la foto di apertura, è stata scattata da Claudio a Novegro.
Andrea - “I fermodellisti sono tanti e legati da un'amicizia sincera, che esplode in una cordialità ormai rara nel mondo rumoroso ed incerto di oggi”. La valle incantata
-
Andrea
- Socio GAS TT
- Messaggi: 23717
- Iscritto il: mercoledì 26 ottobre 2011, 19:42
- Nome: Andrea
- Regione: Lombardia
- Città: Milano
- Ruolo: Amministratore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Andrea - “I fermodellisti sono tanti e legati da un'amicizia sincera, che esplode in una cordialità ormai rara nel mondo rumoroso ed incerto di oggi”. La valle incantata
-
saverD445

- Socio GAS TT
- Messaggi: 4387
- Iscritto il: mercoledì 2 maggio 2012, 21:07
- Nome: Valerio
- Regione: Sardegna
- Città: Macomer
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Gran bella foto storia..
Adesso però voglio i diritti d'autore per aver fotografato i miei carri e il kof elaborato da Gianluca....
Adesso però voglio i diritti d'autore per aver fotografato i miei carri e il kof elaborato da Gianluca....
Valerio -- Plastico H0-H0m Epoca IV-VI Il mio canale YouTube
-
Riccardo

- Socio GAS TT
- Messaggi: 5643
- Iscritto il: domenica 11 dicembre 2011, 9:26
- Nome: Riccardo
- Regione: Lombardia
- Città: Milano
- Età: 21
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
bella fotostoria,
ben dettagliata. Bravi Edgardo e Adolfo,
ben dettagliata. Bravi Edgardo e Adolfo,
Riccardo
-
liftman

- Messaggi: 7762
- Iscritto il: domenica 29 gennaio 2012, 14:40
- Nome: Rolando
- Regione: Liguria
- Città: La Spezia
- Ruolo: Moderatore
- Stato: Non connesso
-
Andrea
- Socio GAS TT
- Messaggi: 23717
- Iscritto il: mercoledì 26 ottobre 2011, 19:42
- Nome: Andrea
- Regione: Lombardia
- Città: Milano
- Ruolo: Amministratore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
liftman ha scritto:
incredibilmente "error-free"
Non c'è più la Santa Inquisizione di un tempo...
Anche i Santi invecchiano.
P.S.: quando ho visto che avevi risposto... [:I]
Andrea - “I fermodellisti sono tanti e legati da un'amicizia sincera, che esplode in una cordialità ormai rara nel mondo rumoroso ed incerto di oggi”. La valle incantata
-
liftman
- Messaggi: 7762
- Iscritto il: domenica 29 gennaio 2012, 14:40
- Nome: Rolando
- Regione: Liguria
- Città: La Spezia
- Ruolo: Moderatore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Andrea ha scritto:
P.S.: quando ho visto che avevi risposto... [:I]
Ciao!
Rolando
Rolando
-
adobel55

- Socio GAS TT
- Messaggi: 11464
- Iscritto il: venerdì 18 novembre 2011, 15:51
- Nome: Adolfo
- Regione: Lazio
- Città: Roma
- Ruolo: Moderatore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Ottima foto storia.
Ciao
Adolfo
Ciao
Adolfo
Adolfo Bellabona - Il magazzino di Montello - Piccola città - Incrocio fra treni - La valle de vapore – Il mio “bombolone” in scala 1:87
-
Egidio

- Messaggi: 14309
- Iscritto il: giovedì 17 maggio 2012, 13:26
- Nome: Egidio
- Regione: Abruzzo
- Città: Ortona
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Confermo anch' io...... Saluti. Egidio.
Egidio Lofrano
-
adobel55
- Socio GAS TT
- Messaggi: 11464
- Iscritto il: venerdì 18 novembre 2011, 15:51
- Nome: Adolfo
- Regione: Lazio
- Città: Roma
- Ruolo: Moderatore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Comunque, per scassare i ......... un errore c'è.
In un passaggio il mio cognome è scritto in minuscolo........ ahi ahi ahi !!!!.
Ciao.
Adolfo
In un passaggio il mio cognome è scritto in minuscolo........ ahi ahi ahi !!!!.
Ciao.
Adolfo
Adolfo Bellabona - Il magazzino di Montello - Piccola città - Incrocio fra treni - La valle de vapore – Il mio “bombolone” in scala 1:87
-
Andrea
- Socio GAS TT
- Messaggi: 23717
- Iscritto il: mercoledì 26 ottobre 2011, 19:42
- Nome: Andrea
- Regione: Lombardia
- Città: Milano
- Ruolo: Amministratore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
adobel55 ha scritto:
Comunque, per scassare i ......... un errore c'è.
In un passaggio il mio cognome è scritto in minuscolo....
Dopo controllo!
Andrea - “I fermodellisti sono tanti e legati da un'amicizia sincera, che esplode in una cordialità ormai rara nel mondo rumoroso ed incerto di oggi”. La valle incantata
-
Edgardo_Rosatti
- Socio GAS TT
- Messaggi: 5237
- Iscritto il: venerdì 28 ottobre 2011, 0:59
- Nome: Edgardo
- Regione: Lombardia
- Città: Muggiò
- Età: 61
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Dopo l'azionamento del PL con Android, che tralaltro necessita ancora di qualche aggiustatina meccanica su una delle 2 sbarre, è giunto il momento di mettere mano alla motorizzazione della piattaforma girevole.
Attualmente è solo posata sul modulo tramite un perno che le permette di ruotare manualmente e di ricevere la corretta polarità di alimentazione sulle rotaie tramite un invertitore.
Era tempo che volevo sperimentare l'uso dei motori passo passo e visto che le prime prove con Arduino sono andate a buon fine ho iniziato a lavorarci su per motorizzarla.
Ho recuperato un paio di motori da una vecchia stampante e li ho provati con una schedina collegata ad Arduino.
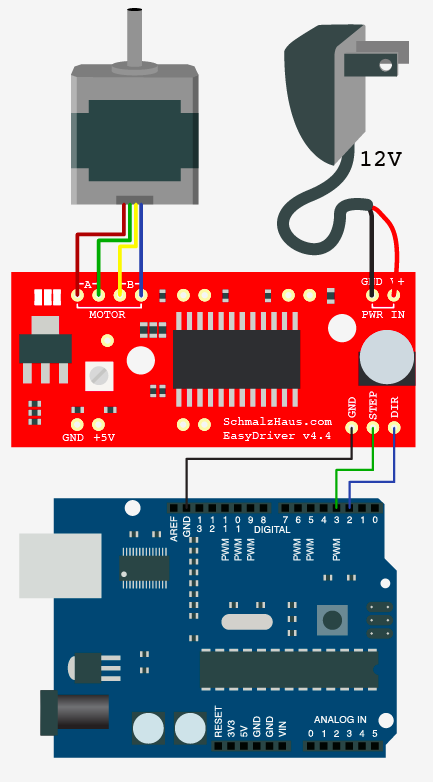
I motori funzionano a 24 Volt e la scheda usata per i test si chiama Easydriver.
Dalle prime prove effettuate ho visto che gestire un motore passo passo con Arduino ed Easydriver è piuttosto semplice,
in quanto basta collegare le bobine del motore alla scheda e dire ad Arduino quanti passi deve fare il motore e quale direzione di rotazione prendere.
L'idea è semplice, se non fosse per il fatto che tra motore e la piattaforma deve esserci un accoppiamento meccanico.
E qui vengono i problemi.
Smontando la stampante, oltre ai motori è possibile recuperare anche diversi ingranaggi che possono essere utilizzati per la meccanica della piattaforma.
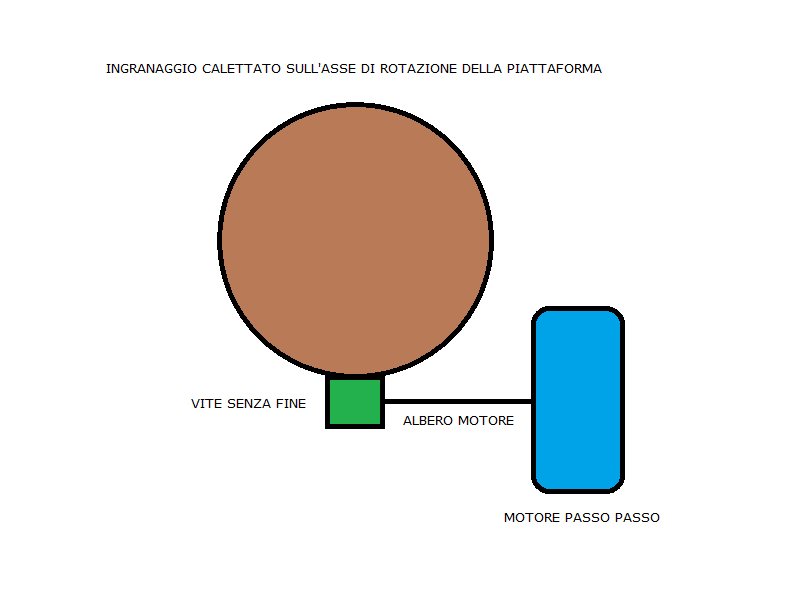
Il motore che sto provando ha un alberino con una vite senza fine da accoppiare ad un ingranaggio da calettare sul perno di rotazione della piattaforma.
Francamente non so se funzionerà. Male che vada potrò dire di averci provato... [:I]
Per ora rimango sullo sperimentale con un paio di foto delle schede per il controllo del motore:
BBoard:
49,76 KB
Prototipo:
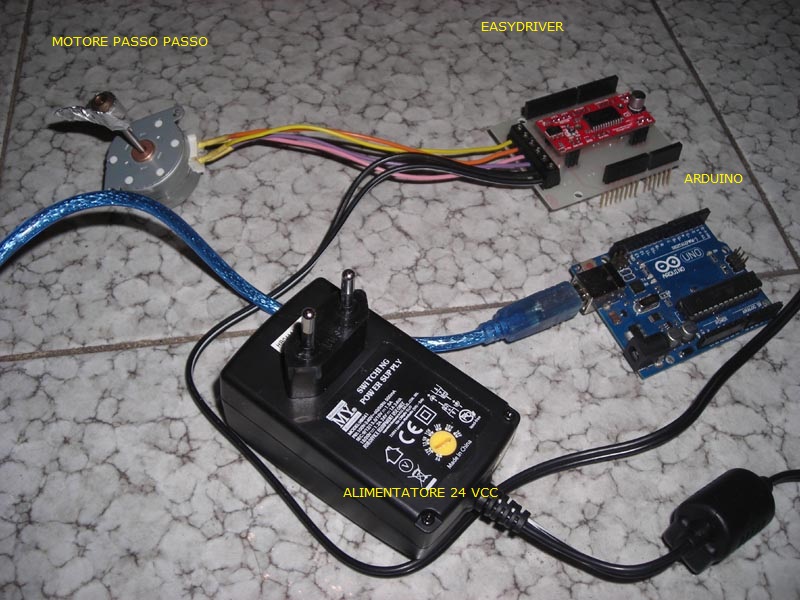
182,76 KB
Easydriver:

128,84 KB
..e se son rose fioriranno.
Edgardo
Documentazione:
- Easydriver:
http://www.schmalzhaus.com/EasyDriver/
https://www.sparkfun.com/tutorials/400
Attualmente è solo posata sul modulo tramite un perno che le permette di ruotare manualmente e di ricevere la corretta polarità di alimentazione sulle rotaie tramite un invertitore.
Era tempo che volevo sperimentare l'uso dei motori passo passo e visto che le prime prove con Arduino sono andate a buon fine ho iniziato a lavorarci su per motorizzarla.
Ho recuperato un paio di motori da una vecchia stampante e li ho provati con una schedina collegata ad Arduino.
I motori funzionano a 24 Volt e la scheda usata per i test si chiama Easydriver.
Dalle prime prove effettuate ho visto che gestire un motore passo passo con Arduino ed Easydriver è piuttosto semplice,
in quanto basta collegare le bobine del motore alla scheda e dire ad Arduino quanti passi deve fare il motore e quale direzione di rotazione prendere.
L'idea è semplice, se non fosse per il fatto che tra motore e la piattaforma deve esserci un accoppiamento meccanico.
E qui vengono i problemi.
Smontando la stampante, oltre ai motori è possibile recuperare anche diversi ingranaggi che possono essere utilizzati per la meccanica della piattaforma.
Il motore che sto provando ha un alberino con una vite senza fine da accoppiare ad un ingranaggio da calettare sul perno di rotazione della piattaforma.
Francamente non so se funzionerà. Male che vada potrò dire di averci provato... [:I]
Per ora rimango sullo sperimentale con un paio di foto delle schede per il controllo del motore:
BBoard:
49,76 KB
Prototipo:
182,76 KB
Easydriver:
128,84 KB
..e se son rose fioriranno.
Edgardo
Documentazione:
- Easydriver:
http://www.schmalzhaus.com/EasyDriver/
https://www.sparkfun.com/tutorials/400
ED
-
Fabrizio

- Socio GAS TT
- Messaggi: 11393
- Iscritto il: giovedì 10 novembre 2011, 21:17
- Nome: Fabrizio
- Regione: Piemonte
- Città: Piossasco
- Ruolo: co-amministratore
- Età: 42
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Bene Ed, sono curioso di vedere il meccanismo Mostraci le immagini degli ulteriori avanzamenti
Ciao
Fabrizio
Ciao
Fabrizio
Fabrizio
-
Andrea
- Socio GAS TT
- Messaggi: 23717
- Iscritto il: mercoledì 26 ottobre 2011, 19:42
- Nome: Andrea
- Regione: Lombardia
- Città: Milano
- Ruolo: Amministratore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Estremamente interessante Ed, grazie per la condivisione.
Andrea - “I fermodellisti sono tanti e legati da un'amicizia sincera, che esplode in una cordialità ormai rara nel mondo rumoroso ed incerto di oggi”. La valle incantata
-
adobel55
- Socio GAS TT
- Messaggi: 11464
- Iscritto il: venerdì 18 novembre 2011, 15:51
- Nome: Adolfo
- Regione: Lazio
- Città: Roma
- Ruolo: Moderatore
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Bravo Ed.
Ciao
Adolfo
Ciao
Adolfo
Adolfo Bellabona - Il magazzino di Montello - Piccola città - Incrocio fra treni - La valle de vapore – Il mio “bombolone” in scala 1:87
-
cararci

- Socio GAS TT
- Messaggi: 4694
- Iscritto il: giovedì 4 ottobre 2012, 14:56
- Nome: Carlo
- Regione: Veneto
- Città: Volpago del Montello
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Edgardo, facci sognare!
Carlo - Il guizzo della trota - Teatro greco - Il Castellaccio
-
Edgardo_Rosatti
- Socio GAS TT
- Messaggi: 5237
- Iscritto il: venerdì 28 ottobre 2011, 0:59
- Nome: Edgardo
- Regione: Lombardia
- Città: Muggiò
- Età: 61
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Grazie a tutti, il meccanismo in sè è molto semplice ed è formato da un accoppiamento tra una vite senza fine calettata sul motore e un ingranaggio solidale col perno della piattaforma.
Detto così sembra facile e dovrebbe permettermi di avere un buon rapporto di riduzione per gestire al meglio i passi del motore con un movimento lento dell'insieme.
Meccanismo:
10,28 KB
Lo schema è semplice, realizzarlo e metterlo in opera la sarà un po' meno.
Un'altro aspetto importante è il comando della piattaforma tramite pulsanti, quindi ho realizzato uno shield aggiuntivo per Arduino che servirà ad azionare la piattaforma.
Con 4 pulsanti posso gestire tutti i movimenti richiesti per il tracciato che ho usato nel modulo.
Pulsanti:

74,75 KB
Questa scheda consente di selezionare 3 posizioni della piattaforma più l'inversione di 180°, cioè con 3 pulsanti seleziono i tre binari di ingresso/uscita e col quarto ruoto di 180° la piattaforma per invertirne la posizione. L'officina spesso chiede di ricoverare il materiale rotabile in un detreminato verso per la manutenzione.
Questa opzione, per un impianto analogico implica l'inversione di polartià delle rotaie della piattaforma e verrà prevista in una futura scheda in modo automatico.
Per ora questa funzione è demandata ad un invertitore manuale già presente sul modulo.
Un problema che sto riscontrando è l'eccessivo surriscaldamento del motore, in quanto il modulo Easydriver alimenta costantemente le sue bobine e tiene in posizione il motore anche quando fermo. Tuttavia, il modulo ha la possibilità di gestire la corrente inviata al motore e di selezionare una modalità chiamata "sleep" che consente di alimetare il motore solo quando deve lavorare per muovere la piattaforma.
Sfruttando queste caratteristiche dovrei riuscire ad ottimizzare il funzionamento evitandone il surriscaldamento.
E' possibile usare Processing eliminando così tutti i pulsanti, ma per questa applicazione l'avere un pc collegato costantemente al modulo è un po' uno spreco di risorse.
Non per il GASTT Lab...
Detto così sembra facile e dovrebbe permettermi di avere un buon rapporto di riduzione per gestire al meglio i passi del motore con un movimento lento dell'insieme.
Meccanismo:
10,28 KB
Lo schema è semplice, realizzarlo e metterlo in opera la sarà un po' meno.
Un'altro aspetto importante è il comando della piattaforma tramite pulsanti, quindi ho realizzato uno shield aggiuntivo per Arduino che servirà ad azionare la piattaforma.
Con 4 pulsanti posso gestire tutti i movimenti richiesti per il tracciato che ho usato nel modulo.
Pulsanti:
74,75 KB
Questa scheda consente di selezionare 3 posizioni della piattaforma più l'inversione di 180°, cioè con 3 pulsanti seleziono i tre binari di ingresso/uscita e col quarto ruoto di 180° la piattaforma per invertirne la posizione. L'officina spesso chiede di ricoverare il materiale rotabile in un detreminato verso per la manutenzione.
Questa opzione, per un impianto analogico implica l'inversione di polartià delle rotaie della piattaforma e verrà prevista in una futura scheda in modo automatico.
Per ora questa funzione è demandata ad un invertitore manuale già presente sul modulo.
Un problema che sto riscontrando è l'eccessivo surriscaldamento del motore, in quanto il modulo Easydriver alimenta costantemente le sue bobine e tiene in posizione il motore anche quando fermo. Tuttavia, il modulo ha la possibilità di gestire la corrente inviata al motore e di selezionare una modalità chiamata "sleep" che consente di alimetare il motore solo quando deve lavorare per muovere la piattaforma.
Sfruttando queste caratteristiche dovrei riuscire ad ottimizzare il funzionamento evitandone il surriscaldamento.
E' possibile usare Processing eliminando così tutti i pulsanti, ma per questa applicazione l'avere un pc collegato costantemente al modulo è un po' uno spreco di risorse.
Non per il GASTT Lab...
ED
-
gavinca

- Socio GAS TT
- Messaggi: 2077
- Iscritto il: martedì 22 maggio 2012, 13:07
- Nome: Carlo
- Regione: Piemonte
- Città: Bellinzago Novarese
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Bel progetto Ed, aspetto gli sviluppi.
Come fai a rilevare la posizione di partenza con la piattaforma circolare ?
Come fai a rilevare la posizione di partenza con la piattaforma circolare ?
-
Edgardo_Rosatti
- Socio GAS TT
- Messaggi: 5237
- Iscritto il: venerdì 28 ottobre 2011, 0:59
- Nome: Edgardo
- Regione: Lombardia
- Città: Muggiò
- Età: 61
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Bella domanda Carlo. Teoricamente se faccio partire il motore da un punto calibrato in partenza non dovrei avere problemi, a patto di spegnere il meccanismo nel medesimo punto.
Con la vite senza fine l'accoppiamento dovrebbe risultare molto stabile, poi basta calcolare quanti passi deve fare il motore per le 3 posizioni. Però dubito che nel tempo il sistema si mantenga, quindi dovrei perlomeno inserire un microinterruttore per lo zero e far eseguire all'avvio del programma la calibrazione.
Per non inserire il microinterruttore potrei scrivere un programma che mi consenta di fare la calibrazione manualmente sempre tramite i pulsanti.
Non so ancora bene come farò, probabilmente userò 2 pulsanti per il movimento orario/antiorario e gli altri 2 per la calibrazione.
E' una incognita e fino a quando non avrò montato il sistema non saprò come agire.
Con la vite senza fine l'accoppiamento dovrebbe risultare molto stabile, poi basta calcolare quanti passi deve fare il motore per le 3 posizioni. Però dubito che nel tempo il sistema si mantenga, quindi dovrei perlomeno inserire un microinterruttore per lo zero e far eseguire all'avvio del programma la calibrazione.
Per non inserire il microinterruttore potrei scrivere un programma che mi consenta di fare la calibrazione manualmente sempre tramite i pulsanti.
Non so ancora bene come farò, probabilmente userò 2 pulsanti per il movimento orario/antiorario e gli altri 2 per la calibrazione.
E' una incognita e fino a quando non avrò montato il sistema non saprò come agire.
ED
-
Edgardo_Rosatti
- Socio GAS TT
- Messaggi: 5237
- Iscritto il: venerdì 28 ottobre 2011, 0:59
- Nome: Edgardo
- Regione: Lombardia
- Città: Muggiò
- Età: 61
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Ho iniziato a sviluppare una scheda di controllo per il meccanismo della piattaforma che usa il modulo easydriver e un display lcd in standard Hitachi.
Qualche foto del progetto:
Scheda display:

510,77 KB
La scheda contiene anche 5 pulsanti NO (visibilii nella parte bassa) che tramite un partitore resistivo si collegano ad una porta analogica di Arduino.
Il cuore della scheda è formato da una scheda Arduino Uno e un modulo Easydriver dedicato al controllo del motore passo passo tramite i pulsanti sopracitati.
Easydriver:
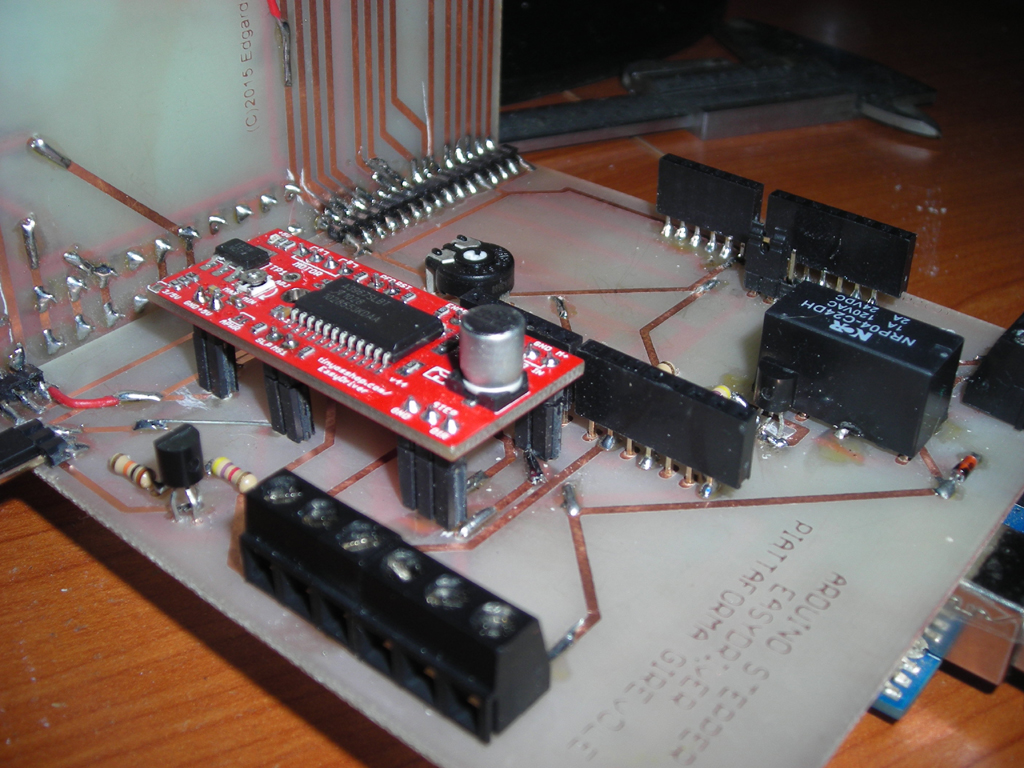
570,5 KB
Arduino:
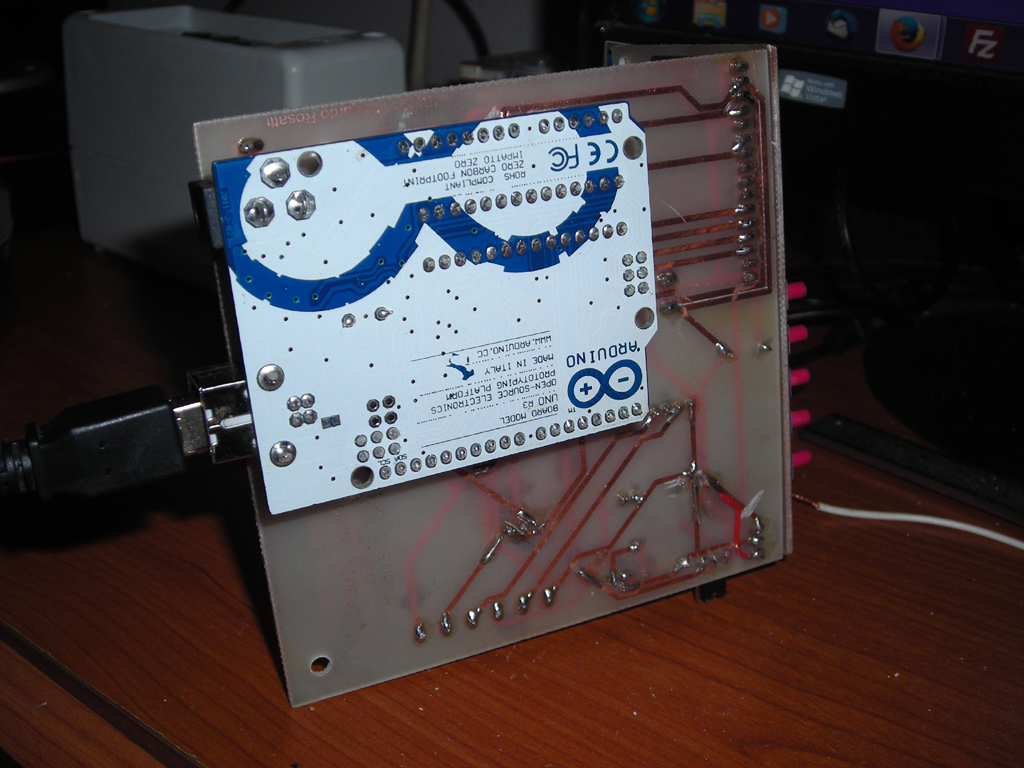
509,08 KB
Il software è ancora in fase di sviluppo e l'idea è quella di avere un menù sul display lcd per la gestione del motore passo passo.
Inoltre il sistema deve "ricordarsi" sempre la posizione del piatto di rotazione.
Scheda:
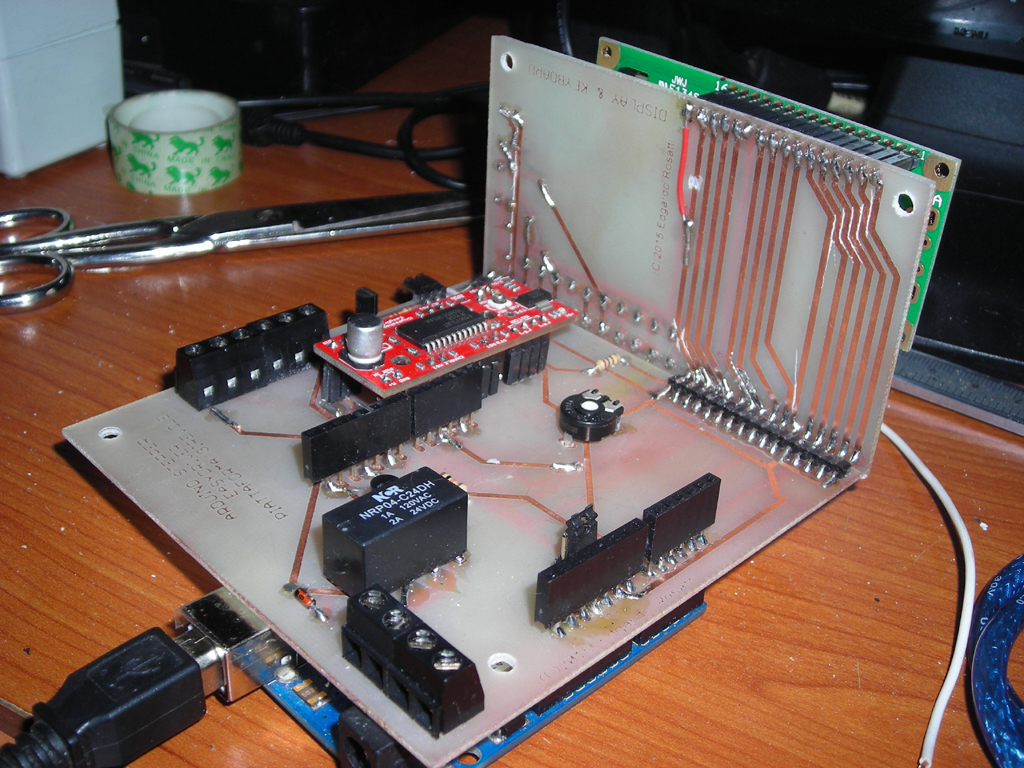
669,3 KB
Arduino Uno dispone di una eprom interna, cioè una memoria non volatile in grado di memorizzare i parametri di posizione del motore anche a dispositivo spento.
Attualmente il progetto è ancora in fase di sviluppo, tuttavia procede abbastanza bene e tra non molto dovrei riuscire a mettere a punto il software (il condizionale in questi casi è d'oblligo).
Qualche foto del progetto:
Scheda display:
510,77 KB
La scheda contiene anche 5 pulsanti NO (visibilii nella parte bassa) che tramite un partitore resistivo si collegano ad una porta analogica di Arduino.
Il cuore della scheda è formato da una scheda Arduino Uno e un modulo Easydriver dedicato al controllo del motore passo passo tramite i pulsanti sopracitati.
Easydriver:
570,5 KB
Arduino:
509,08 KB
Il software è ancora in fase di sviluppo e l'idea è quella di avere un menù sul display lcd per la gestione del motore passo passo.
Inoltre il sistema deve "ricordarsi" sempre la posizione del piatto di rotazione.
Scheda:
669,3 KB
Arduino Uno dispone di una eprom interna, cioè una memoria non volatile in grado di memorizzare i parametri di posizione del motore anche a dispositivo spento.
Attualmente il progetto è ancora in fase di sviluppo, tuttavia procede abbastanza bene e tra non molto dovrei riuscire a mettere a punto il software (il condizionale in questi casi è d'oblligo).
ED
-
Marshall61

- Messaggi: 7203
- Iscritto il: martedì 1 novembre 2011, 20:50
- Nome: Carlo
- Regione: Toscana
- Città: Livorno
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
....Edgardo, se continui così, ti assumono all' E.S.A...... ....sinceri complimenti per i traguardi raggiunti e per i futuri che a breve lo saranno....un ottimo lavoro come nel tuo stile!!!!
Ciao, Carlo
Ciao, Carlo
Carlo - Non esistono problemi, esistono solo le soluzioni. È lo spirito dell'uomo a creare il problema dopo. (Andrè Gide)
-
dilan

- Messaggi: 3959
- Iscritto il: martedì 7 maggio 2013, 7:32
- Nome: Antonino
- Regione: Lombardia
- Città: Scanzorosciate
- Stato: Non connesso
Re: MODULI "piattaforma girevole" e "ultimo casello"
Bel lavoro, molto bravo!
Per me, che non mastico elettronica, è fantascienza.
Per me, che non mastico elettronica, è fantascienza.
Antonio