Immagine:
 31,91 KB
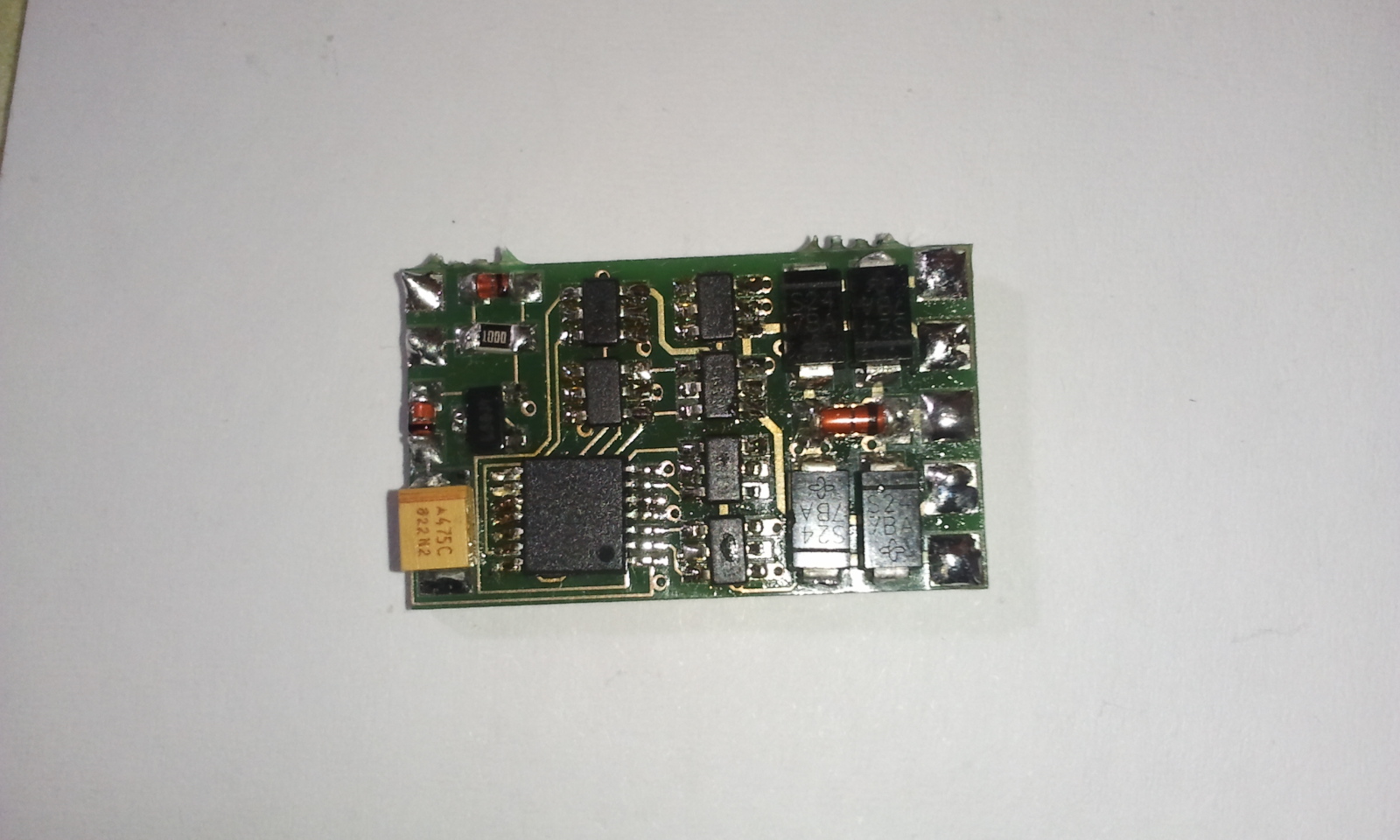
Ingresso segnale DCC e Alimentazione decoder
31,91 KB
Ingresso segnale DCC e Alimentazione decoder
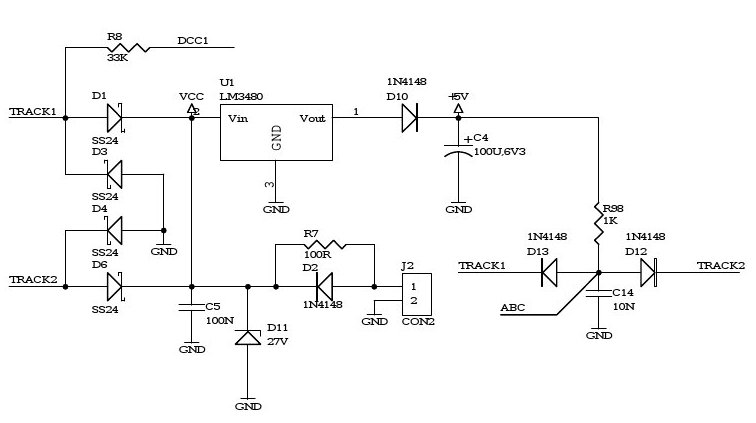
L'ingresso e' un ponte raddrizzatore a diodi schottky (D1/D3/D4/D6), senza nessuna particolarita', i diodi usati sono gli SS24 che possono sostenere una corrente continua di 2A (questo sara' oggetto di prove).
Il diodo schottky (silicio/metallo) ha una tensione di caduta ridotta (0.4-0.5V) rispetto al diodo tradizionale (silicio/silicio) quindi garantisce una potenza dissipata ridotta (circa 1W con una corrente di 1A) sul ponte.
Questa dissipazione e' il piu' grande problema "termico" nel decoder perche' l'unica fonte di dissipazione e' sul PCB e attrraverso i fili di collegamento (spesso si mettono i decoder nel termorestringente o nel nastro per isolarli elettricamente, riducendo molto convezione e irraggiamento).
Questo punto potrebbe essere superato facendo un raddrizzatore a mosfet che avrebbe il vantaggio di una dissipazione statica quasi nulla ma lo svantaggio di entrare in conduzione ad una tensione maggiore (VgsP+VgsN), peggiorando le caratteristiche del decoder specie in modalita' analogica.
Il segnale DCC non raddrizzato viene portato attraverso una resistenza da 33K al pin di interrupt (INT) del PIC dove triggerera' un interrupt ad ogni fronte in salita e discesa del segnale DCC (ogni 50us se vengono trasmessi "1" o ogni 100us se vengono trasmessi "0").
Il segnale viene saturato in alto (5V) e in basso (0V) dai diodi di protezione del PIC stesso.
Nel funzionamento in analogico la stessa resistenza permettera' al PIC di discriminare se la rotaia destra e' positiva rispetto alla sinistra (o viceversa) e impostare la corretta direzione.
La tensione raddrizzata del DCC viene filtrata con un condensatore e viene limitata a 27V con un diodo zener che impedisce alle eventuali extratensioni (specie del motore) di superare i 30V che sono la tensione massima per i mosfet di pilotaggio del motore stesso e delle uscite funzioni.
A questo punto e' connesso il parallelo di una resistenza e un diodo (D2/R7) che permettono la carica di una grossa capacita' "tampone" da collegare al connettore J2 per sopperire alla mancanza di alimentazione nei tratti di contatto incerto.
Questa capacita' si carichera' a corrente ridotta (resistenza R7 da 100Ohm) mentre la scarica sara' istantanea nel momento che la tensione Vcc scendera' facendo condurre il diodo D2 e dando al motore un piccolo spunto per vincere il punto di cattiva captazione (anche questo sara' oggetto di prove).
La tensione di alimentazione per il PIC e' ricavata con un regolatore lineare a 5V (un piccolo 7805) e viene fatta passare ad un condensatore C4 di notevole capacita' che impedira' al PIC di resettarsi in caso di mancanza temporanea dell'alimentazione DCC (La durata di questo periodo sara' oggetto di test).
Il condensatore e' connesso al regolatore attraverso un diodo (D10) che impedisce al condensatore di scaricarsi sulla resistenza di uscita (bassa) del regolatore stesso durante la mancanza del segnale DCC in ingresso.
La presenza di questo diodo porta la tensione di alimentazione del PIC a 4.4V ma conferisce grande robustezza ai cali improvvisi di tensione garantendo centinaia di millisecondi (da misurare) di autonomia.
L'ultimo circuito da analizzare e' quello di detezione delle differenze di ampiezza tra la semionda positiva e quella negativa del segnale DCC (D12/D13/C14/R98).
Il segnale DCC viene applicato alternativamente ai capi del condensatore C14 che si carichera' esattamente alla differenza tra le due ampiezze e la resistenza R98 fara' si che tale valore rimanga sempre nel range 0-5V.
Nel caso di segnale DCC perfettamente "bilanciato" il segnale ABC sara' a 0V, nel caso di squilibrio delle ampiezze questo segnale diventera' un'onda quadra alla frequenza del segnale DCC in ingresso e di ampiezza uguale alla differenza delle ampiezze delle due semionde.
Questo segnale verra' inviato ad un pin analogico del PIC, connesso ad un comparatore interno che lo confrontera' con una soglia variabile (impostata con il DAC interno) che quindi portera' ad un segnale binario controllabile dal programma del microcontrollore per frenare o accelerare la loco automaticamente (senza comandi DCC specifici).
<center>«Gli unici progetti che meritano di essere intrapresi sono quelli a cui non si e' sicuri di arrivare in fondo.»</center> <center> «La perfezione (nel design) si ottiene non quando non c'è nient'altro da aggiungere, bensì quando non c'è più niente da togliere.»</center>

, costo massimo dell'oggetto finito 10-15€... stanziamento massimo per lo sviluppo = una bella loco, diciamo 250€. Tutto rigorosamente open source dai files costruttivi del PCB fino al sorgente del microcontrollore. Ma se ci riusciamo, ti ricrederai su quello che fanno le aziende di questo settore? Sono solo hobbysti evoluti (tedeschi, inglesi e americani inclusi...) se facessero girare i numeri che dici tu, un decoder costerebbe mezzo euro...