288,05 KB
Apro questo topic per cercare un aiutino da parte di qualche esperto di elettronica.
Il mio plastico ha la sezione principale da 2x1 composta da due piani sovrapposti, su ciascuno dei quali verrà realizzata una stazione.
Sul piano inferiore c'è un cappio di ritorno e la stazione fantasma, mentre sul piano superiore c'è la stazione principale a vista. QUI IL TOPIC SUL PLASTICO
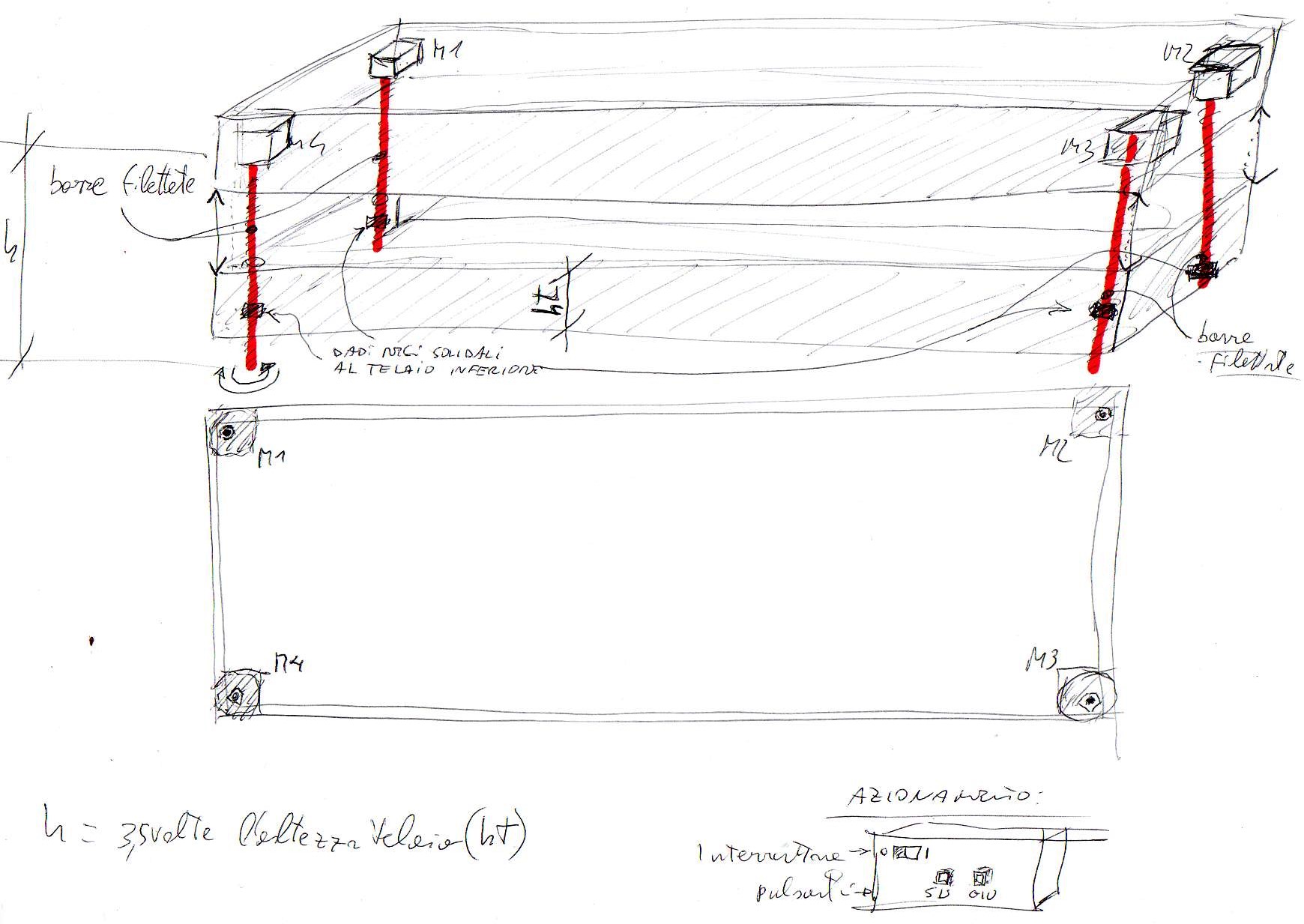
Vorrei realizzare una motorizzazione che possa sollevare completamente il telaio superiore rispetto al telaio inferiore (vincolato al resto dei telai che compongono il plastico e dotato di gambe), in caso di necessità di manutenzione.
Potrebbe infatti capitare un deragliamento, o un inconveniente elettrico/elettronico sugli innumerevoli motori scambio e i collegamenti elettrici delle illuminazioni, per cui deve poter essere accessibile indipendentemente questa parte di telaio.
Ho calcolato che la sezione di telaio da sollevare (2x1 ml) peserà (finita e con su i modelli in utilizzo), dai 20 ai 30 kg complessivi.
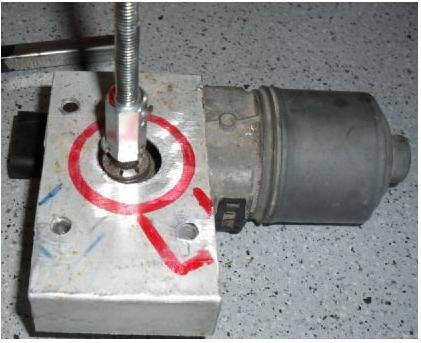
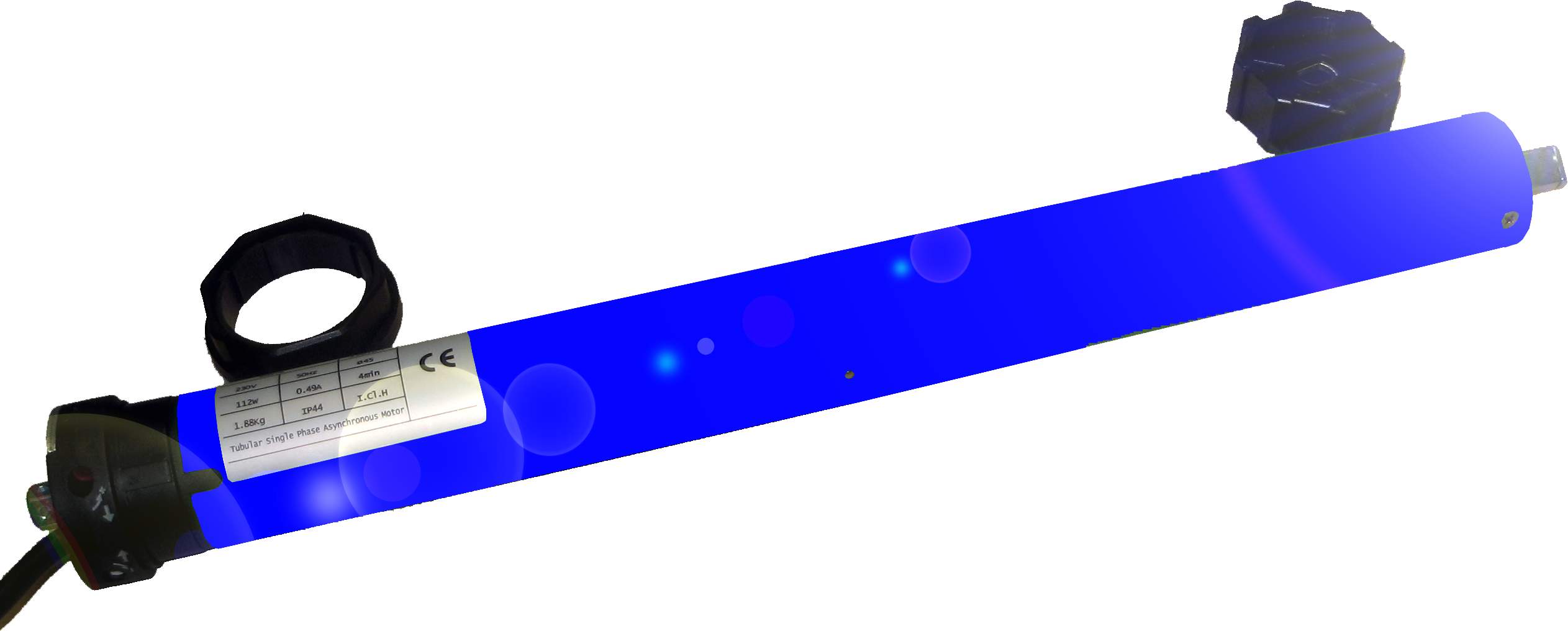
Pensavo di utilizzare 4 motori elettrici, alimentati da 12 V CC, di tipo da stabilire, i quali azioneranno una barra filettata di diametro almeno 6 o 8 mm, la quale sarà resa solidale al perno rotante del motore.
Ogni barra filettata sarà avvitata in un dado che verrà fissato (saldandolo su una piastra metallicha, per esempio) al telaio inferiore.
Ruotando la barra filettata, il telaio potrà salire o scendere.
Affinchè il sistema funzioni, dovranno essere progettate queste caratteristiche:
"I motori Devono essere resi sincroni tra di loro, cioè dovranno avere lo stesso numero di rotazioni per far si che ognuno dei quattro angoli del telaio si sollevi esattamente alla stessa velocità e per la stessa escursione.
""I motori potranno essere azionati da un unico comando, di tipo "SU" o "GIU": premendo il rispettivo pulsante il motore si azionerà, e al rilascio, si fermerà.
"""Concepirei anche un sistema di sicurezza del tipo "a doppio comando di azionamento", in modo che se non premi contemporaneamente un altro pulsante, non avverrà il funzionamento. Questo per evitare accidentali azionamenti.
In alternativa potrà essere escluso il circuito di alimentazione (Power ON/Power off).
""""Sarebbe opportuno dotare di fine corsa il sistema, ma lavorando a rovescio, se si raggiunge il termine della barra filettata, essa girerebbe a vuoto, non costituendo un grave problema.
"""""Ogni motore dovrà sollevare un peso di (alla peggio) kg.30 : 4 = kg 7,5 cadauno. Per cautela, considererei un peso limite di 10 kg a motore.
""""""Per precauzione potrebbe essere reso comandabile a velocità ridotta di rotazione, ogni singolo motore, per poterne calibrare la presa nel dado (questo nel caso in cui le barre uscissero dalla sede).
Non so come tradurre in coppia motrice il peso verticale di 10 kg.
La barra filettata di per sè dovrebbe demoltiplicare un pochino la forza necessaria, se ben oliata.
Non so se adottare motori passo passo o motori normali.
Chiedo aiuto a chi si sente di prendersi carico di questa piccola progettazione elettronica, condividendone qui, le conclusioni.